Method
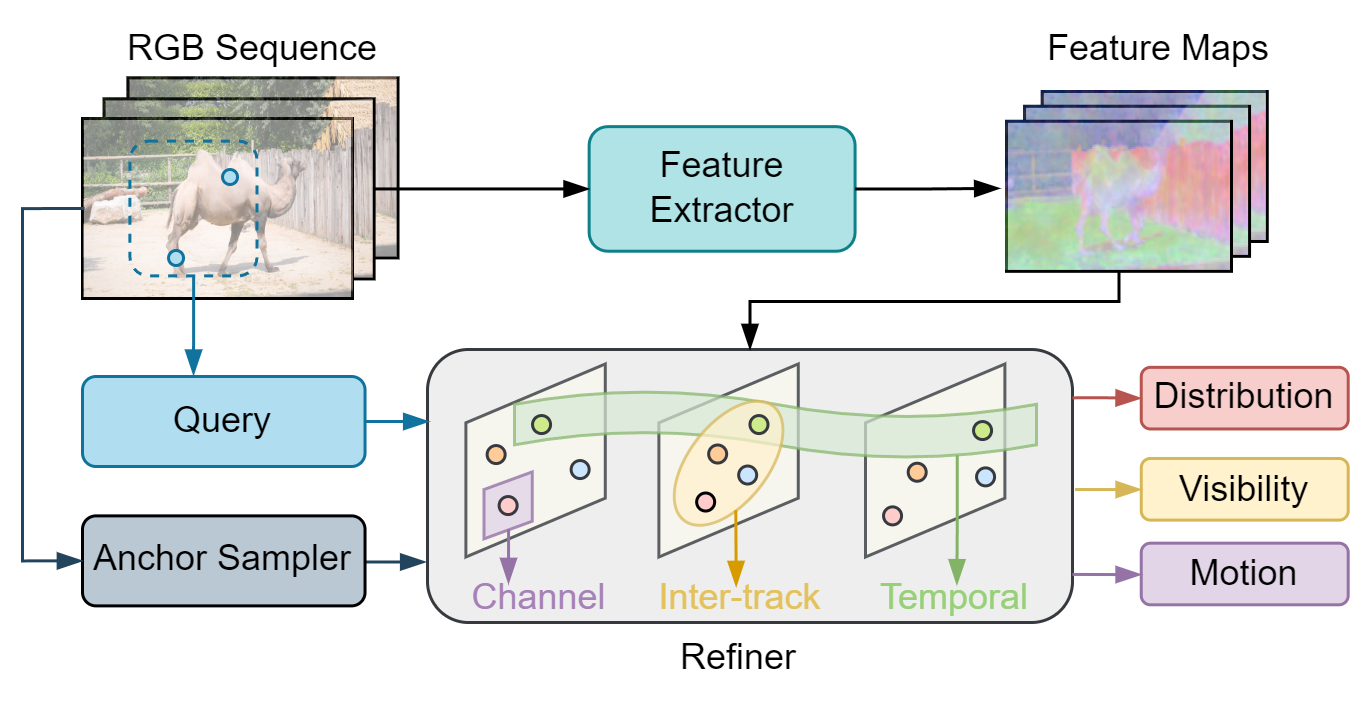
LEAP Front-end: After extracting image feature maps, selected anchors assist in tracking. The queries and anchors are processed by a refiner to iteratively update states, aggregating channel, inter-track, and temporal information. The LEAP tracker outputs trajectory distribution, visibility, and dynamic track labels.
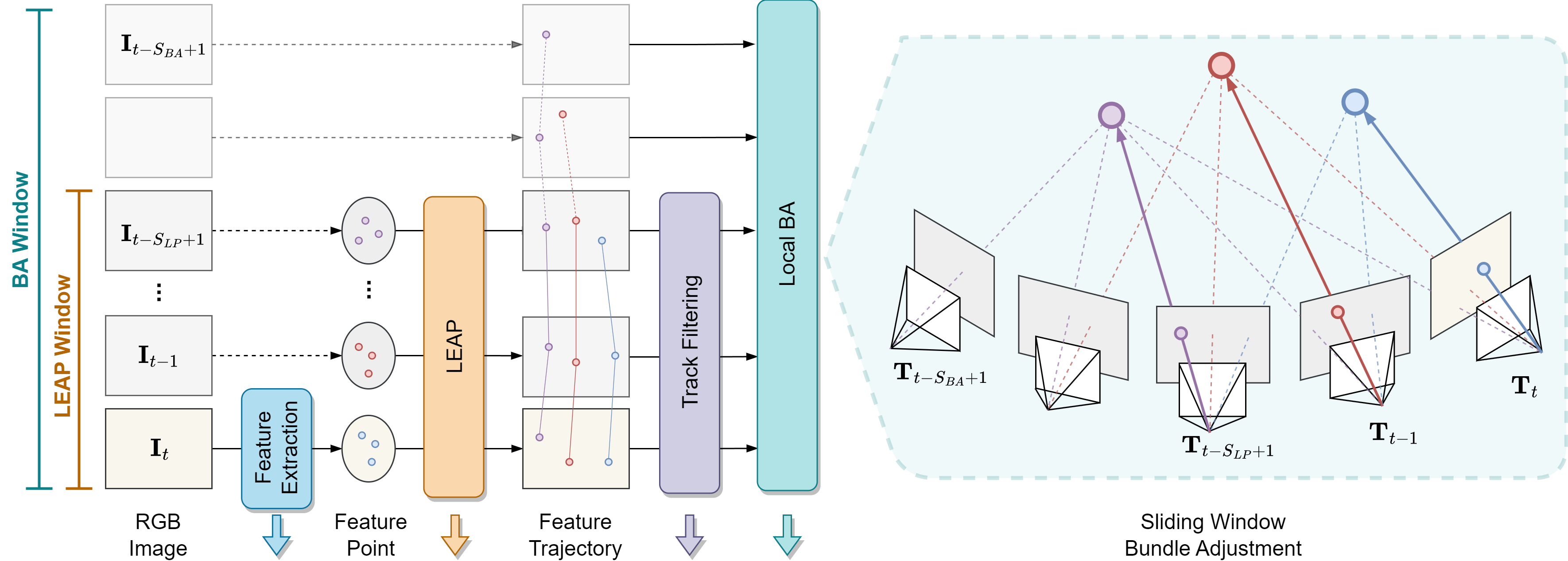
LEAP-VO: Given a new image, the feature extractor extracts new keypoints from the incoming image. Then, all the keypoints are tracked across all other frames within the current LEAP window, followed by a track filtering step to remove outliers. Finally, the local BA module is used on the current BA window to update the camera poses and 3D positions of the extracted keypoints.