|
Hi, I am a first-year PhD student at Technical University of Munich and University of Oxford under ELLIS, supervised by Prof. Daniel Cremers and Prof. Andrea Vedaldi. Previously, I received my Master's degree in Computer Science from ETH Zurich advised by Prof. Marc Pollefeys. I worked on 3D vision projects at Microsoft Mixed Reality & AI Lab Zurich, Computer Vision and Geometry Group (CVG), and Computer Vision Lab (CVL). Before this, I obtained my Bachelor's degree in Computer Science from The Chinese University of Hong Kong and interned at SenseTime Research. My research interests lie in the interplay between computer vision and 3D geometry, with a focus on visual localization, 3D/4D reconstruction, and neural scene representations. I am also broadly interested in object-level perception, egocentric vision, and spatial computing. Email / Google Scholar / Github / Linkedin |

|
|
|
|
[02-2024] Our paper LEAP-VO is accepeted to CVPR 2024, see you in Seattle! [02-2024] Our paper NeRF-SCR is accepeted to ICRA 2024. [10-2023] I join Technical University of Munich as an ELLIS PhD student. [08-2023] I finish my Master's Thesis at Microsoft Mixed Reality & AI Lab Zurich. |
|
|
|
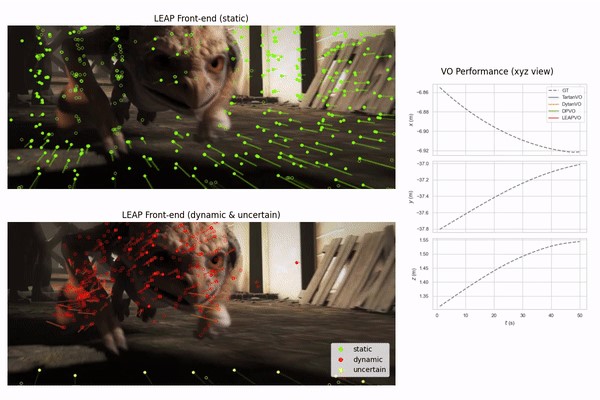
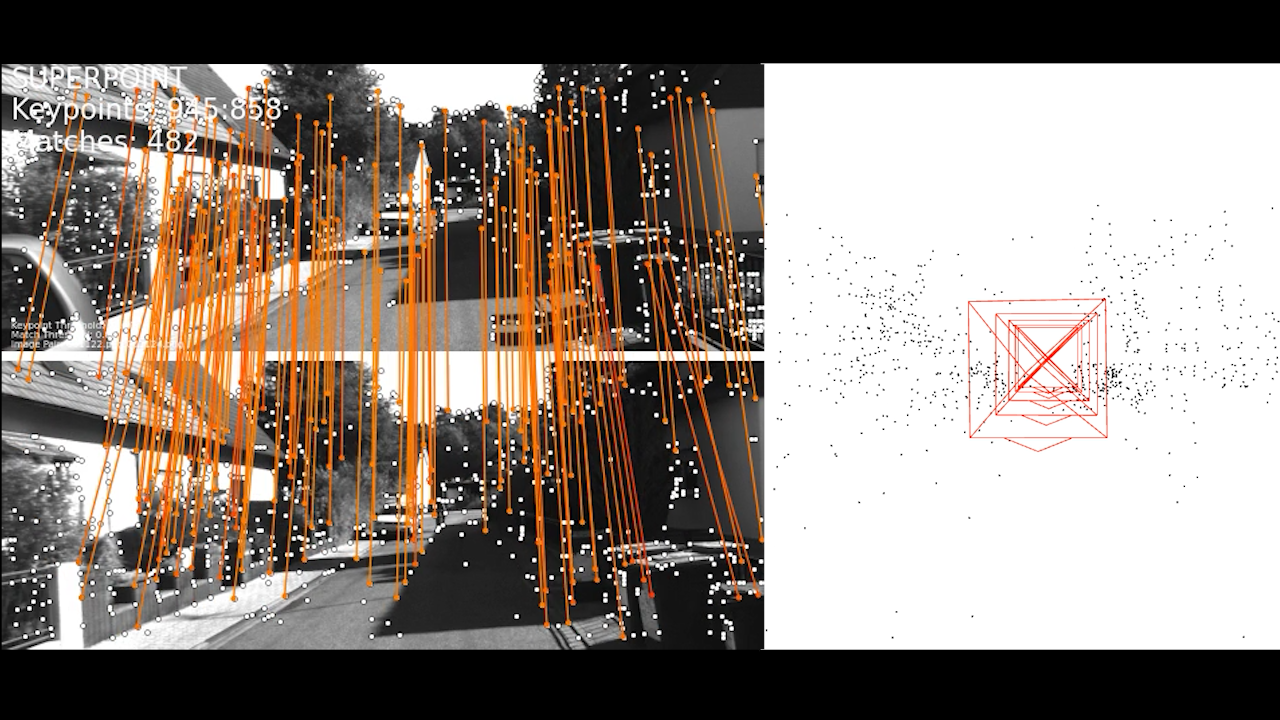
Weirong Chen, Le Chen, Rui Wang, Marc Pollefeys Computer Vision and Pattern Recognition Conference (CVPR), 2024 arXiv / Project Page / Code / Video A robust visual odometry system leveraging temporal context with long-term point tracking to tackle occlusions and dynamic environments. |
|
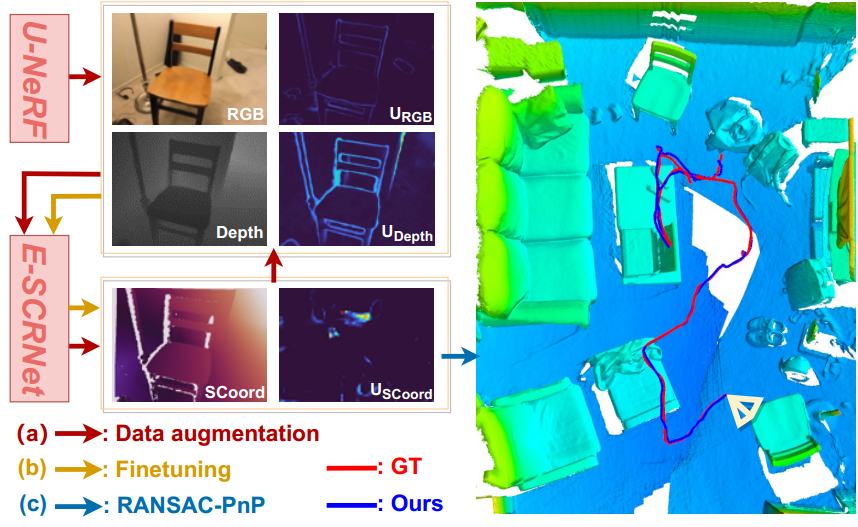
Le Chen, Weirong Chen, Rui Wang, Marc Pollefeys International Conference on Robotics and Automation (ICRA), 2024 arXiv / Video A visual localization pipeline using rendered data from NeRF, uncertainty-guided novel view selection, and evidential scene coordinate regression. |
|
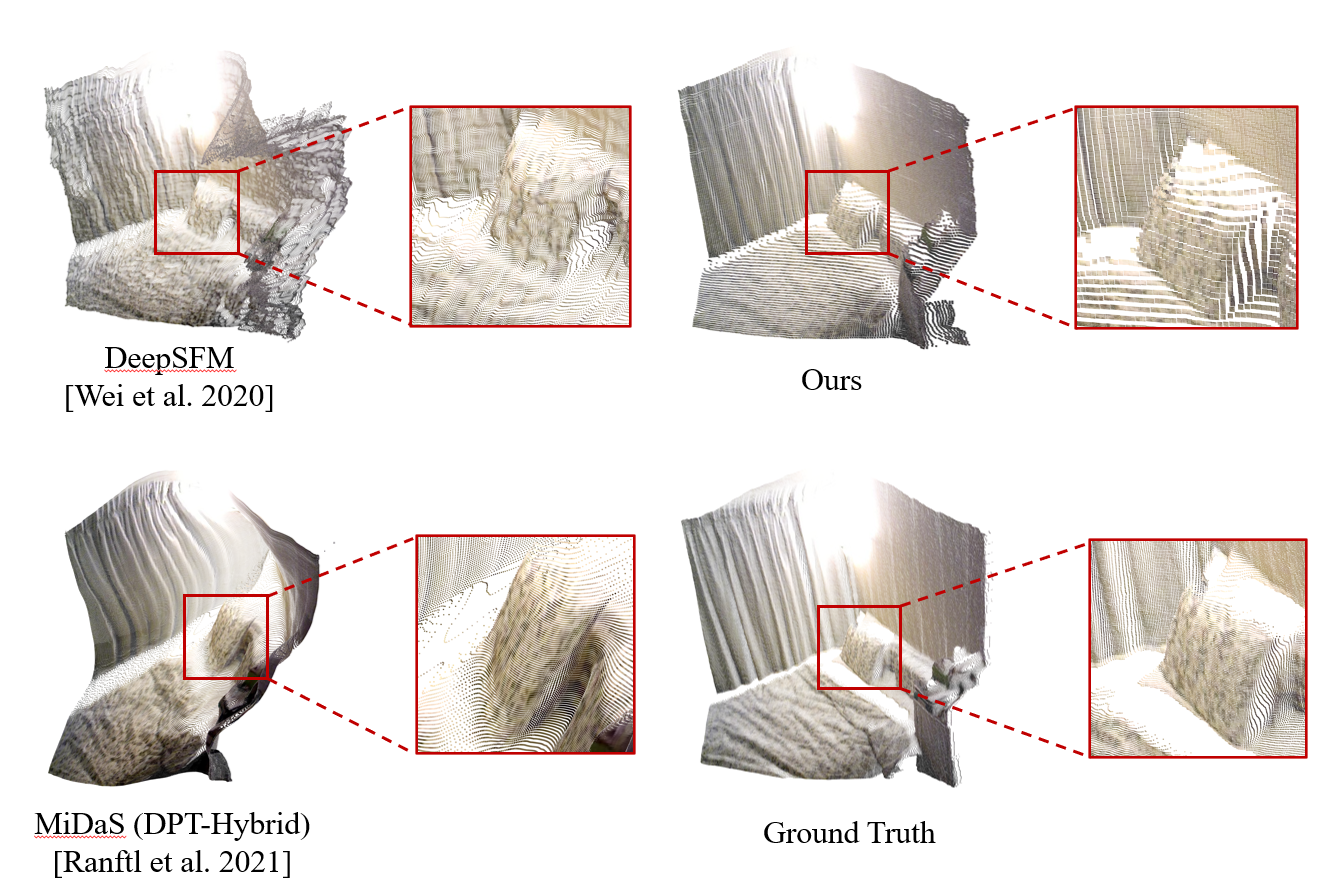
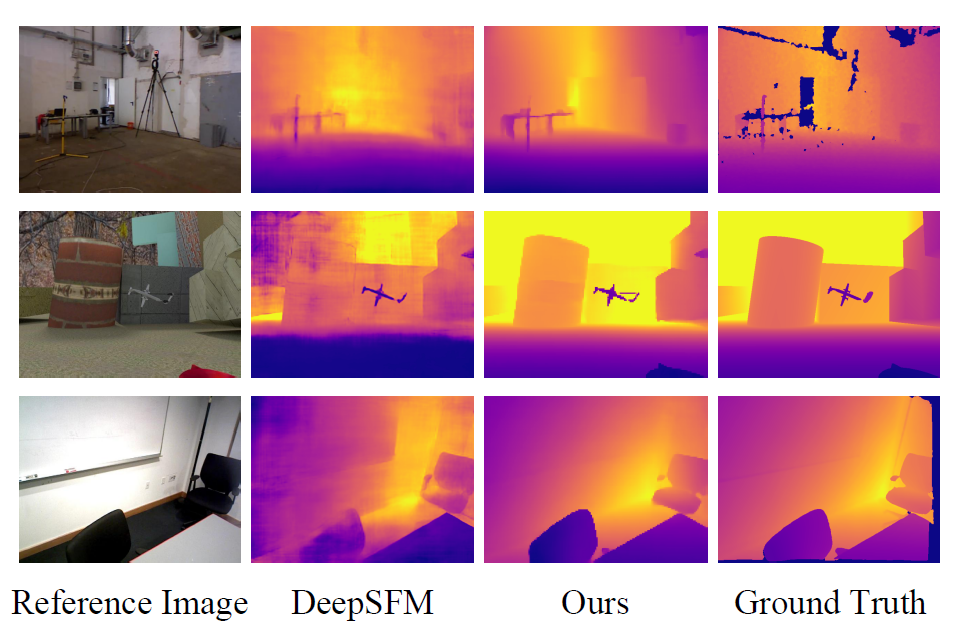
Weirong Chen, Suryansh Kumar, Fisher Yu International Conference on Intelligent Robots and Systems (IROS), 2023 (Oral) IEEE Robotics and Automation Letters (RA-L), 2023 arXiv / Project Page / Video An accurate and reliable pipeline for dense two-view SfM using weighted bundle adjustment with robust outlier filtering and learning-based confidence modeling. |
|
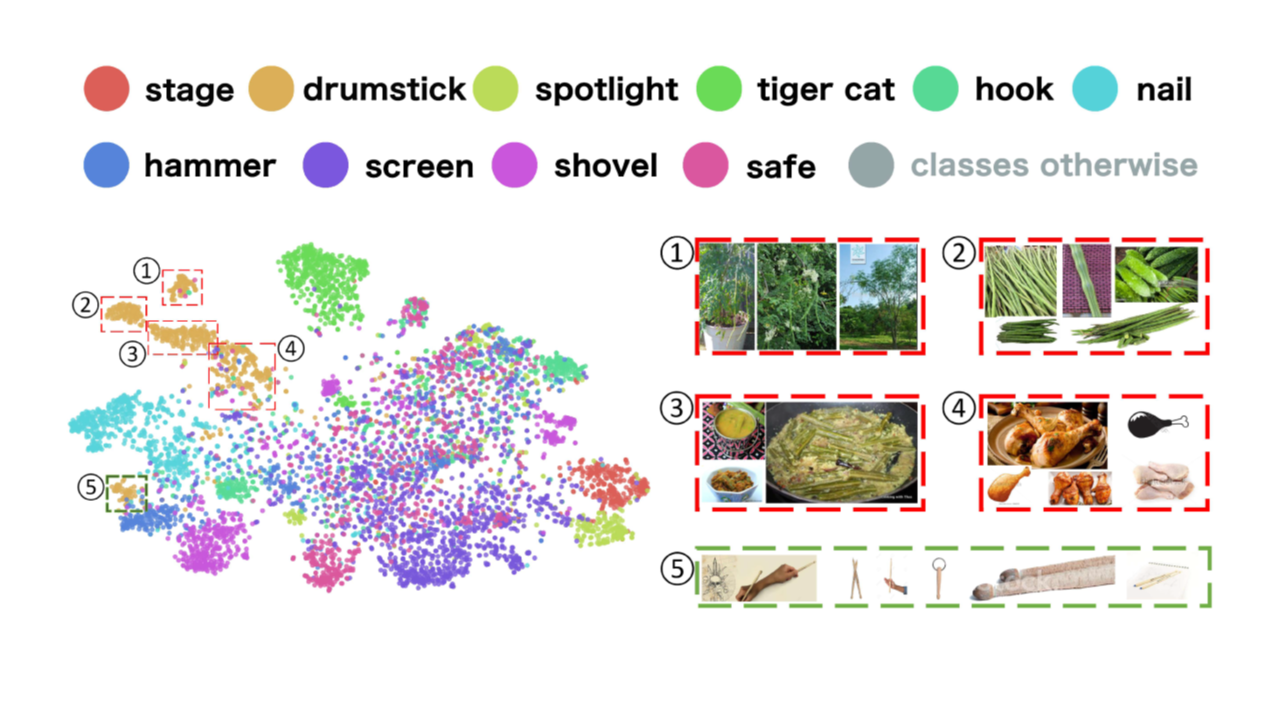
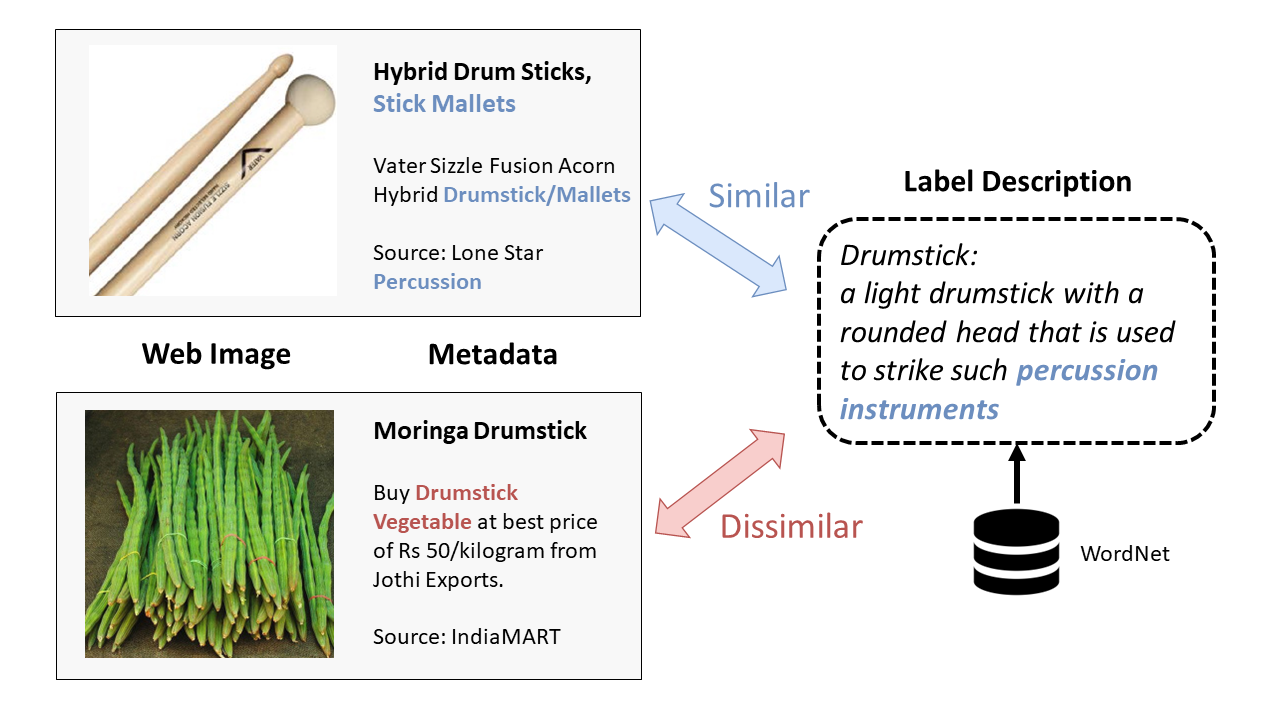
Jingkang Yang*, Weirong Chen*, Litong Feng, Xiaopeng Yan, Huabin Zheng, Wayne Zhang (* equal contribution) ACM International Conference on Multimedia (ACM MM), 2020 (Oral) arXiv / Slides Webly supervised learning for semantic label confusion using visual-semantic graph with metadata-aware anchor selection and GNN-based label propagation. |
|
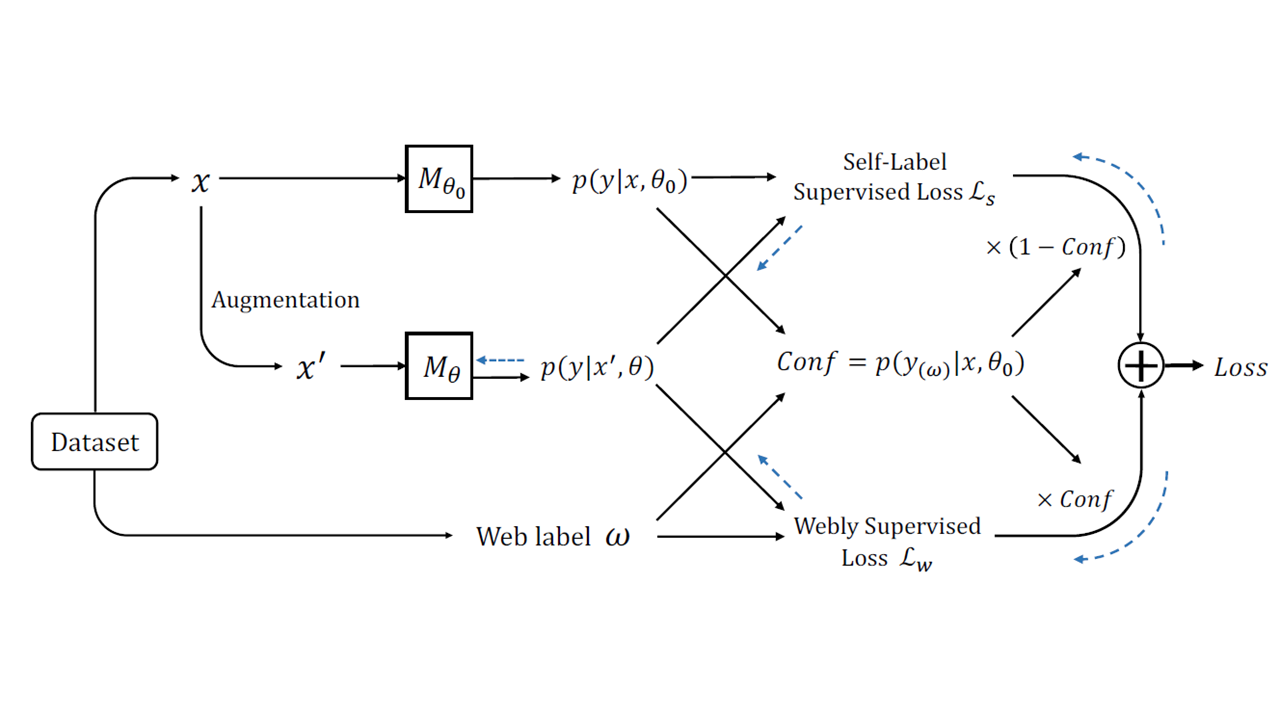
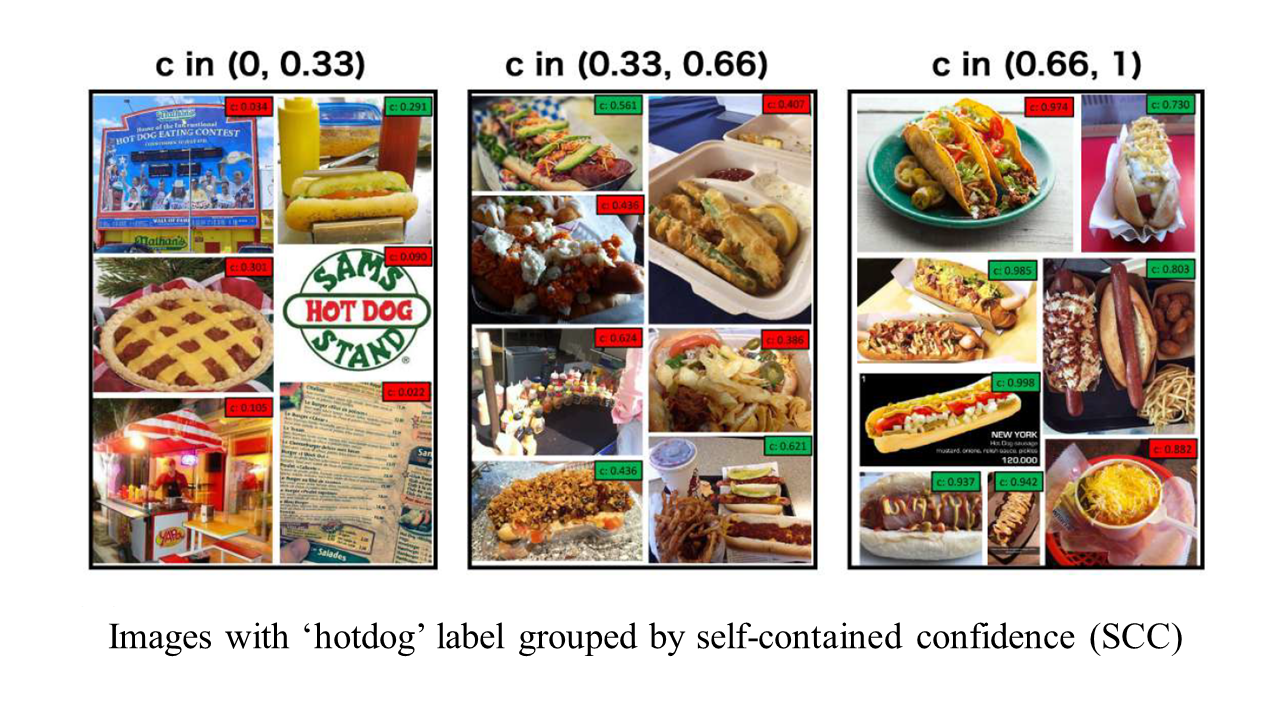
Jingkang Yang, Litong Feng, Weirong Chen, Xiaopeng Yan, Huabin Zheng, Ping Luo, Wayne Zhang European Conference on Computer Vision (ECCV), 2020 arXiv / Code Webly supervised learning for noisy label classification via sample-wise web label correction with model confidence and pseudo machine label. |
|
|
|
Conference with Yifei Liu, Kexin Shi, Yidan Gao Supervised by Paul‑Edouard Sarlin and Marc Pollefeys Demo (KITTI) / Demo (Zurich) / Report A robust and highly-extensible Python SLAM built on pycolmap; achieved better pose accuracy and significant speed improvement compared to COLMAP. |
|
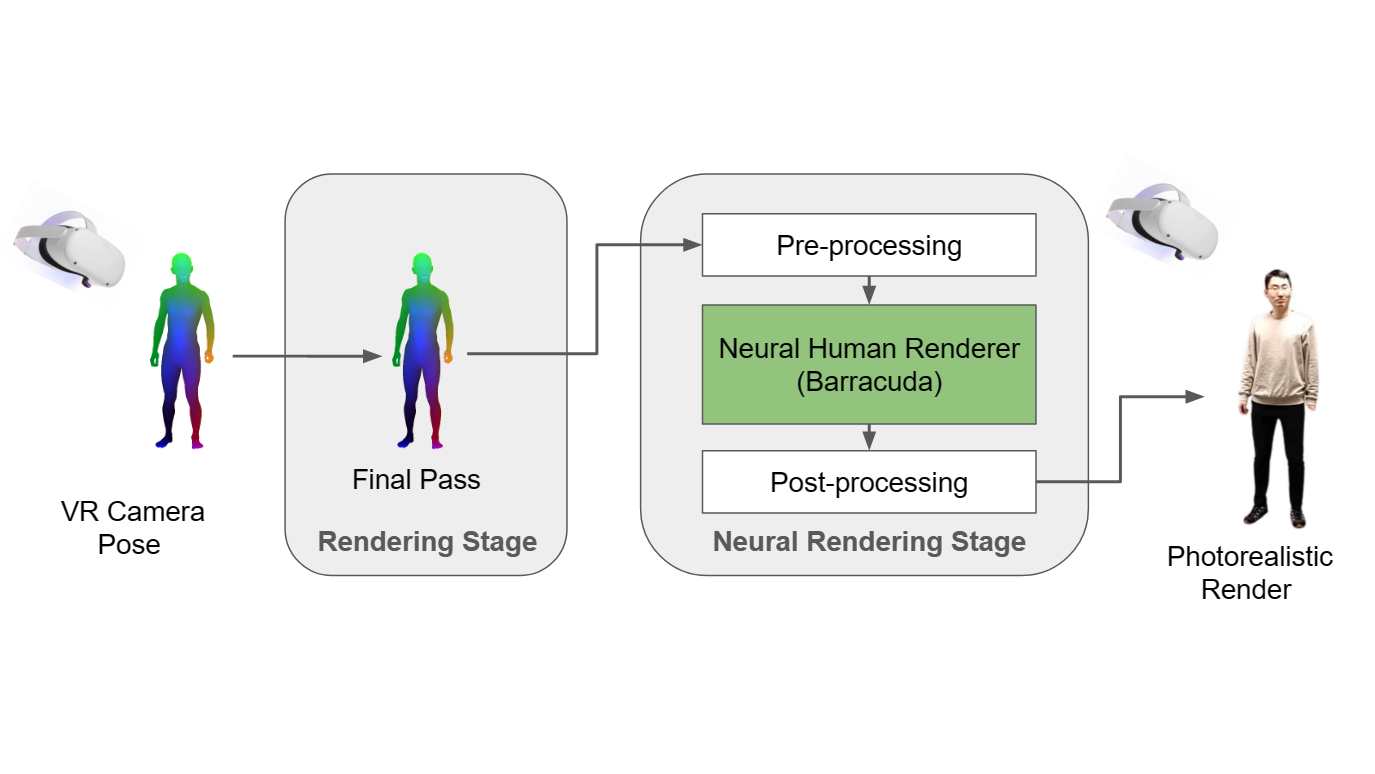
with Shengqu Cai, Mingyang Song, Tianfu Wang Supervised by Sergey Prokudin Demo / Report / Code A general neural rendering pipeline for photorealistic synthesis in VR devices in real-time; demo included human neural rendering and scene style transfer. |
|
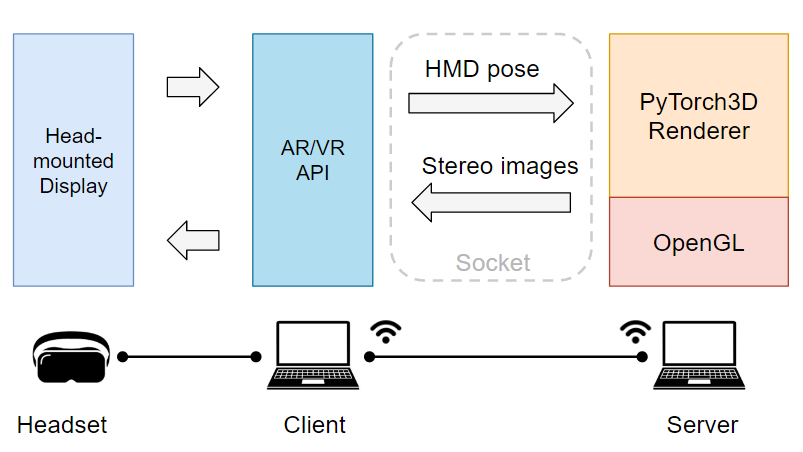
Research Assistant at ETH VLG Supervised by Sergey Prokudin and Siyu Tang Code A customizable VR neural rendering viewer for evaluating and developing neural rendering methods in Python; built on Pytorch3D and OpenVR. |
|
|
| Microsoft Mixed Reality & AI Lab Zurich | Mentors: Rui Wang, Marc Pollefeys | 11/2022 - 08/2023 |
| ETH Computer Vision and Learning Group | Mentors: Sergey Prokudin, Siyu Tang | 06/2022 - 09/2022 |
| SenseTime Research | Mentors: Litong Feng, Wayne Zhang | 05/2019 - 09/2019 |
|
|
- Conference Reviewer: CVPR
|
Last updated: June 2024
|